
How can we improve the operational efficiency of gantry palletizing robots?
2024-12-18

As a highly automated device, the gantry robot can execute pre-programmed sequences to achieve automated operations. It features multiple degrees of freedom in three-dimensional space, enabling it to perform complex handling tasks. Its robust design allows it to withstand repeated use in industrial environments. Compared to manual operation, it offers high cost-effectiveness and delivers excellent long-term return on investment...


However, in practical applications, gantry robots still face challenges:
Low control accuracy & poor real-time performance
Traditional point-to-point control has low precision and poor real-time performance.
Complex programming
The axis group programming is challenging, the kinematic model has limitations, and operation is complex.
Slow to start
The loading trajectory issue causes the robotic arm to start slowly.
STEP Solutions
STEP has effectively addressed these pain points through technological optimization:
Electronic Cam Process
Improve control accuracy and reduce programming difficulty.
PAC+HMI architecture
The control system featuring a PAC+HMI architecture simplifies the operation process.
One Master and Multiple Slaves Electronic Cam
Achieve strong coupling between the master and slave axes, enhancing motion smoothness and scalability.
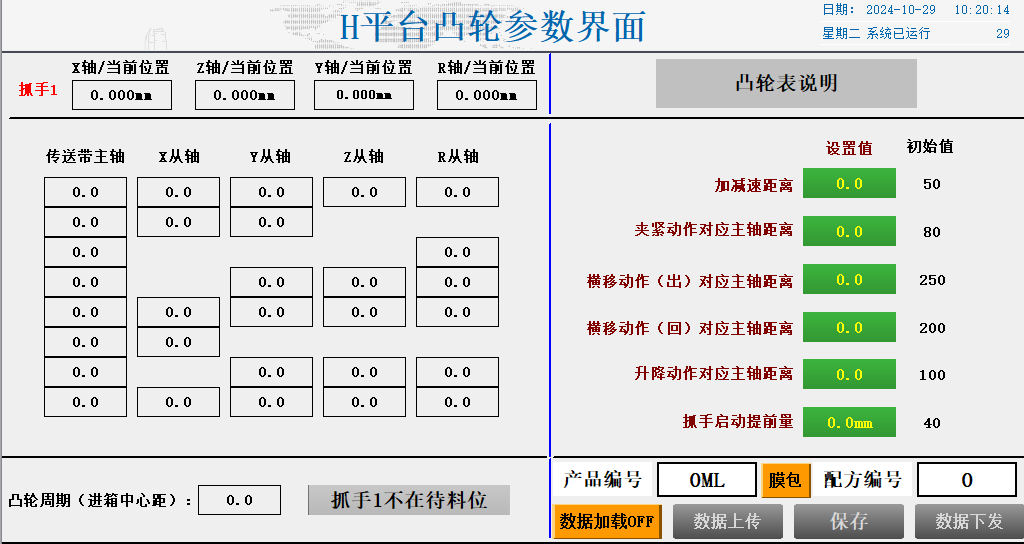
Cam table setting optimization
Enter parameters via the touchscreen to automatically generate cam tables for convenient setup.
Self-developed motion control library
Uses a self-developed library, supports multiple cam profiles, and offers more flexible control.
Scheme Configuration
The following are the technical details and configuration for implementing the above-mentioned solution. Through these technical details and configuration specifications, the performance of the gantry robot has been significantly enhanced, meeting the demands for high efficiency, precision, and safety in industrial automation.
Motion controller: Use the PAC model SC30-B6L from STEP, which controls axis motion via EtherCAT.
Communication method: The configuration screen communicates with the PAC via Modbus TCP, ensuring efficient data transmission.
Servo drive: The STEP Ω6 series servo drives are used to provide stable power output.
Electrical configuration: Using the conveyor belt as the main axis and the X-axis, Y-axis, Z-axis, and R-axis as driven axes, each of these driven axes is coupled to the conveyor belt via cams to achieve precise control.

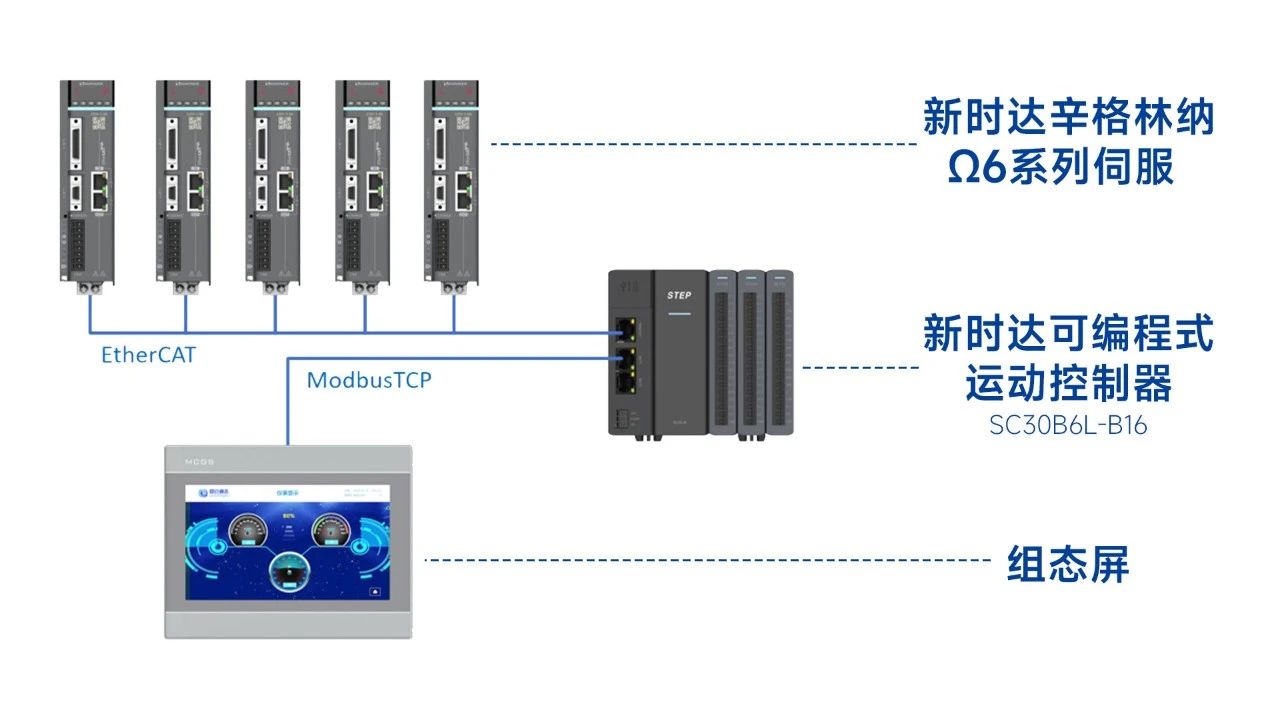
(Electrical Wiring Diagram)
Application Cases
A well-known beer manufacturer in Shandong Province has adopted the STEP SC30-B6L controller and equipped it with 16 Ω6 bus servo drives, thereby upgrading the technology of two sets of gantry robotic arms. As a result of this upgrade, the production line’s palletizing capacity has increased from the original 75 packages per minute to 90 packages per minute, representing a 20% increase in productivity.

Learn more ↓↓↓
Product Information for the Ω6-A Servo Drive
SC30 Series Standard PAC Product Information
The gantry-type robotic arm is a versatile, high-degree-of-freedom automated device suitable for a variety of tasks, such as workpiece clamping and material preparation on CNC lathes. By continuously optimizing and upgrading the motion control system, we can significantly enhance the robotic arm’s operational efficiency and achieve increased production capacity. If you have any questions about upgrading the motion control system of our gantry robotic arm, feel free to interact and exchange ideas with us in the comment section.
Previous:

Contact Us
Email:
market@stepelectric.com
Address:
No. 1560, Siyi Road, Jiading District, Shanghai Municipality