STEP servo | Make parallel robots more stable, faster and stronger
- Views:
- Time of issue:2020-10-16 00:00
STEP servo | Make parallel robots more stable, faster and stronger
- Views:
- Time of issue:2020-10-16 00:00
1. Equipment introduction
The common parallel robot is a four-axis machine as shown in the figure above, which has the functions of translation along the XYZ axis in three-dimensional space and rotation around the Z axis. Its mechanical structure is directly connected to the main arm after the motor is connected to the reducer, and the main arm is connected to the auxiliary arm through a limiter. There will be a fourth axis on the fixed platform or the moving platform for rotation around the Z axis. When moving, the motor drives the main arm to swing up and down within a certain angle, and drives the auxiliary arm to realize the precise positioning of the moving platform.

2. Program introduction
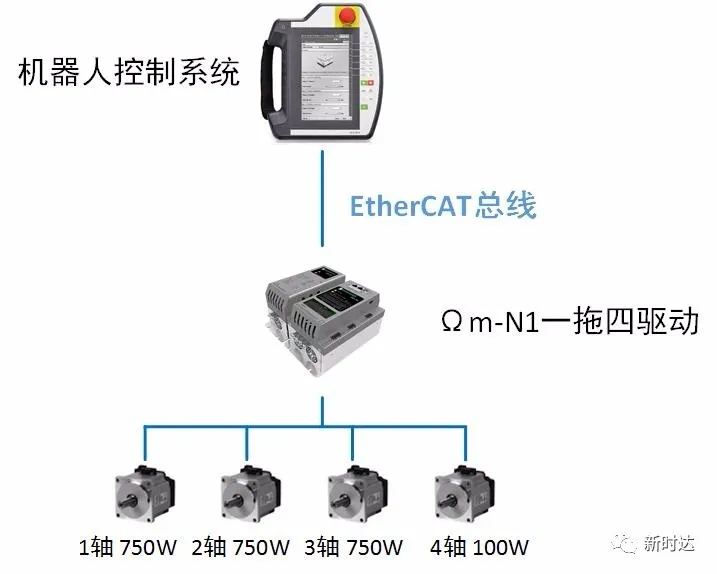
The Ωm-N1 series servo drive used in this program is a multi-axis product launched by the STEP Operation and Control Division. The system uses EtherCAT bus communication. It adopts DC bus power structure, supports multi-drive unit cascading power supply, and three-axis integration and four-axis integration can be flexibly customized to meet different application scenarios.

3. Product Configuration
The main configuration of this solution is shown in the figure above. The robot control system is connected to the Ωm-N1 driver through the EtherCAT bus, and the 1, 2, 3, and 4 axes of the Delta robot are driven respectively. The one-button rigidity adjustment function can easily and quickly complete the debugging of system responsiveness, reducing the debugging time of customers. Through the 3 times overload capability of the driver and the hardware current loop response, it can guarantee that the beat can reach 150 times/min under the standard gate type test action. The excellent end vibration suppression function can effectively eliminate the end vibration below 100Hz, ensuring fast response while avoiding the impact of the final gripping effect due to end vibration.
4. Program features
(1) ODM adopts standard 402 protocol, which can cooperate with mainstream control systems on the market, including Keba's robot control system.
(2) Ωm-N1 four-axis integrated, one-to-four drives perfectly match the configuration of parallel robots, with high synchronization performance.
(3) The volume is so small that it can be grasped by one hand, which can save the space of the electric cabinet for customers, choose brackets for installation, further compress the installation space, and ensure the customized needs of customers.
(4) With the help of the dynamic braking function, it is possible to avoid collisions caused by uncontrolled speeding of the system due to abnormal commands or actions.
(5) Matching the self-identifying motor can save the customer from the trouble of debugging, only one rigid parameter is needed to meet the different response needs of customers, and the time for adjustment and setting is greatly shortened.
Scan the QR code to read on your phone
Contact Us
Electrical control:+86-400-820-7921 Variable frequency drive:+86-400-821-0325 Robot :+86-400-920-0275 Motion control:+86-021-3102 6318 Intelligent manufacturing:+86-021-6992 6005 E-mail:info@xinshida.com Address: No.599 Meiyu Road, Jiading District, Shanghai, 201802, China-
Business
-
Service
-
About
Swipe to follow STEP

STEP Service Number

STEP Subscription Number
©️ 2022 Shanghai STEP Electric Corporation ICP10024532-10