
Applications:Photovoltaic industry
Keywords:SCARA Robot
Related products:
The output voltage, current and power of monocrystalline (or polycrystalline) silicon solar cells are so small that they can only be used individually as a power source if they are packaged in series and parallel to form a module. Since the cell size has a variety of fixed standards, direct series and parallel connection does not necessarily meet the needs of the module, so it has to be cut into smaller units before welding, and the industry's more advanced cutting method is to use a laser scribing machine.
Scribing as the first process of module processing, its subsequent processes are as follows.
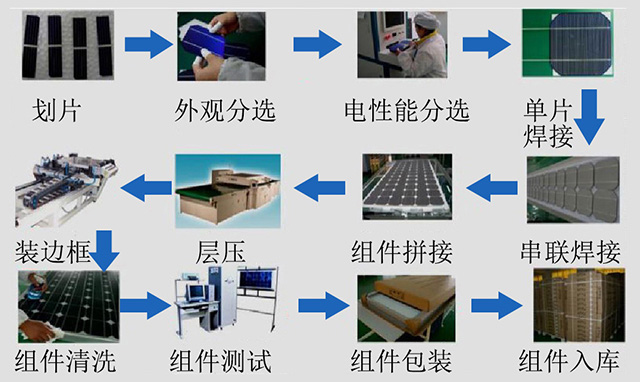
△Photovoltaic module processing process
Zhong Weixing robot and vision system are mainly applied to the scribing and string welding two processes, to provide customers with fast and accurate feeding solutions, of which the scribing machine requires higher accuracy of feeding speed. Take a domestic laser processing equipment and solar equipment manufacturer as an example, we provide SCARA robot and AVS vision system for its laser scribing machine to achieve high speed and high precision loading of dual stations, meeting the key index of 3000pcs/h, placement error + scribing accuracy <±0.15mm.
Project Overview
This set of equipment is suitable for scribing monocrystalline silicon and polycrystalline silicon solar cell wafers of any size, and can complete automatic feeding, automatic positioning, automatic laser scribing, automatic boxing and other functions with a high degree of automation; 1/3 lobe mechanism is optional to realize automatic scribing of 1/3 lobe. The robot and vision system are located at the loading station.
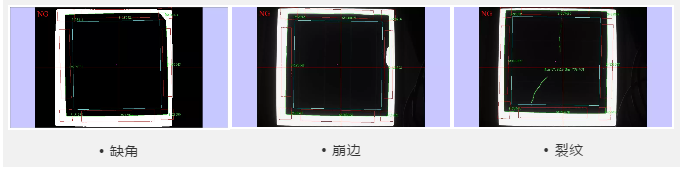
In order to improve the processing efficiency, the scribing capacity should reach 3000pcs/h. Two conveyor belts are specially designed to feed materials at the same time, and after being positioned by the vision system respectively, a SCARA alternately grabs the cells left and right and places them on the scribing table quickly and precisely for laser scribing. The placement error + scribing accuracy is within ±0.15mm. The vision system will also detect its chipped edge, missing corner, crack, cell orientation, etc., and place the scrap box to deal with the problematic incoming material, which can be processed and used again.
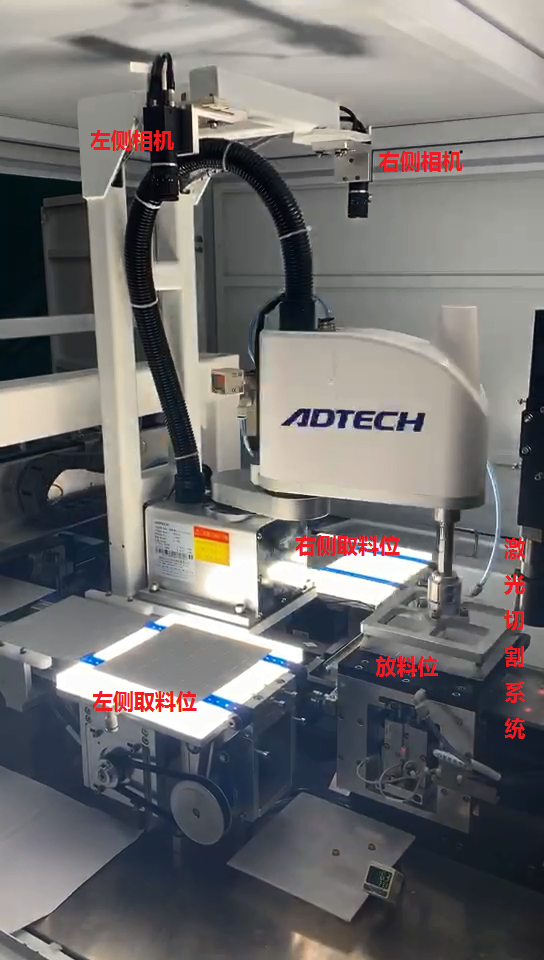
△Structure illustration
Program Components
The pick-up robot adopts ADTECH AR3215 body
+QC400 drive and control integrated machine.
Vision system adopts AVS2300
One-two vision system.
With two 1000w pixel industrial cameras.
Project program and highlights
The main difficulty of this project lies in the high precision and high speed, which should be completed within 1.2S: visual positioning (screening of defective products) → robot picking up materials → putting materials to the scribing table → returning. The robot is required to decelerate at the right time in the process of fast action and move fast and slow.
For the robot, the trajectory path was optimized, the process interaction IO signal was cached, and the multi-threading mechanism of the robot system was applied to achieve the high beat effect of taking pictures on the left side and the right side, and taking pictures on the left side without delay.
In terms of vision positioning, to achieve high-precision positioning under a large field of view of 200mm X 250mm, the unique automatic calibration algorithm of ADTECH was adopted, which not only simplified the calibration process but also improved the calibration accuracy; in addition, the vision software adopted functions such as equal scale scaling, edge finding and corner finding to improve the accuracy to adapt to different sizes of cell switching. In terms of visual defect detection, a cell detection module is specially developed to detect cell defects.
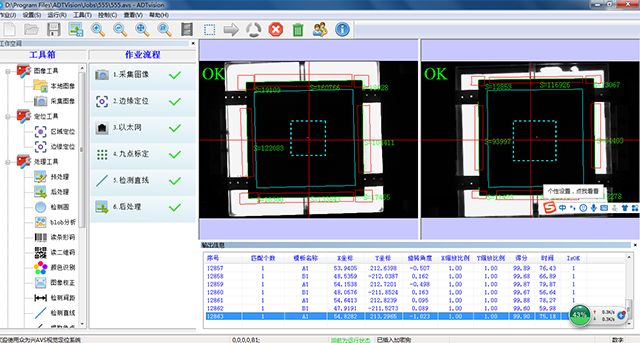
△AVS Vision Software Interface
Contact Us
Electrical control:+86-400-820-7921 Variable frequency drive:+86-400-821-0325 Robot :+86-400-920-0275 Motion control:+86-021-3102 6318 Intelligent manufacturing:+86-021-6992 6005 E-mail:info@xinshida.com Address: No.599 Meiyu Road, Jiading District, Shanghai, 201802, China-
Business
-
Service
-
About
Swipe to follow STEP

STEP Service Number

STEP Subscription Number
©️ 2022 Shanghai STEP Electric Corporation ICP10024532-10