
Applications:伺服系统
Keywords:Servo Systems Industrial Robot
Related products:
Manipulator equipment system part has PLC, human-machine interface, servo system and other components. The human-machine interface, using touch screen, is convenient for the operator to set parameters and monitor the operation status of the whole equipment, and is responsible for the human-machine dialogue communication. PLC is the carrier of the core program, responsible for the pulse signal sending control servo and various feedback signal processing, control the operation and coordination of the implementation mechanism. Servo system, by the drive, servo motor, code plate feedback signal composition, as the main movement mechanism, the main task is to complete the restraint of positioning accuracy, the strict implementation of the pulse signal from the PLC restraint, at the same time, to protect the stability and rapid responsiveness of the pro-motion under repeatedly enabled load, servo performance directly reflects the overall performance and quality of the whole equipment.Manipulator equipment system part has PLC, human-machine interface, servo system and other components. The human-machine interface, using touch screen, is convenient for the operator to set parameters and monitor the operation status of the whole equipment, and is responsible for the human-machine dialogue communication. PLC is the carrier of the core program, responsible for the pulse signal sending control servo and various feedback signal processing, control the operation and coordination of the implementation mechanism. Servo system, by the drive, servo motor, code plate feedback signal composition, as the main movement mechanism, the main task is to complete the restraint of positioning accuracy, the strict implementation of the pulse signal from the PLC restraint, at the same time, to protect the stability and rapid responsiveness of the pro-motion under repeatedly enabled load, servo performance directly reflects the overall performance and quality of the whole equipment.
1、Abstract
This paper introduces the application of Zhiyama G series servo system on robots based on the analysis of the working principle of robots, etc.
2、Manipulator equipment composition
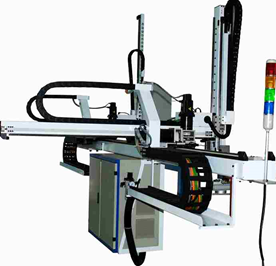
Manipulator equipment system part has PLC, human-machine interface, servo system and other components. PLC is the carrier of the core program, which is responsible for sending pulse signal to control servo and various feedback signal processing, and controlling the operation and coordination of each implementation mechanism. Servo system, by the drive, servo motor, code plate feedback signal composition, as the main movement mechanism, the main task is to complete the restraint of positioning accuracy, the strict implementation of the pulse signal from the PLC restraint, at the same time, to protect the stability and rapid responsiveness of the pro-motion under repeatedly enabled load, servo performance directly reflects the overall performance and quality of the whole equipment. Manipulator shape diagram as shown in Figure.
3, robot principle introduction
The working principle of the robot is actually driven by the servo motor, because the servo motor can calculate the detailed number of revolutions, so you can calculate the distance of movement, the robot is often referred to as the axis, is calculated by the rotary part, a rotary part is considered an axis. Inside the control cabinet of the robot is a servo module and a computing board for controlling the movement of the servo motor and calculating the relative position.
The servo driver receives the PLC pulse command to drive the motor to drive the head for positioning movement. Positioning operation process to run smoothly and smoothly, the servo speed will determine whether the efficiency of the robot to meet the customer's application requirements, in the high-speed positioning of the servo motor can not appear overshoot, oscillation and rectification time is too long.
4、Commissioning considerations
In order to ensure that the servo drive can be reliable, stable and correct operation, in the installation, commissioning and use of the servo system, the following matters should be noted.
(1) the correct wiring: Zhishan servo standard encoder line and motor power line, but the wiring must be correctly connected to the signal line between the servo drive and the controller, otherwise the servo will not operate normally.
(2) correct setting of the servo control mode: as each machine application is different, so the correct setting of the servo control mode is to ensure the correct operation of the servo prerequisite.
3) Correctly match the gain parameters according to the actual operating effect, in addition Zhishan servo do not set the electronic position ring and gear ratio parameters in the case of servo enable or motor operation.
4) Ensure that the motor is well grounded and the drive is connected to the equipment housing. On the one hand to avoid interference, on the other hand to avoid leakage.
5) Signal lines try to choose shielded twisted pair, the shielding layer is generally connected to the terminal housing.
6) Pay attention to the interference problem, avoid interference with the encoder signal and control signal, the encoder line and signal line should not be tied together with the motor line and power line or through a line slot, try to keep a certain distance.
1、Abstract
This paper introduces the application of Zhiyama G series servo system on robots based on the analysis of the working principle of robots, etc.
2、Manipulator equipment composition
Manipulator equipment system part has PLC, human-machine interface, servo system and other components. PLC is the carrier of the core program, which is responsible for sending pulse signal to control servo and various feedback signal processing, and controlling the operation and coordination of each implementation mechanism. Servo system, by the drive, servo motor, code plate feedback signal composition, as the main movement mechanism, the main task is to complete the restraint of positioning accuracy, the strict implementation of the pulse signal from the PLC restraint, at the same time, to protect the stability and rapid responsiveness of the pro-motion under repeatedly enabled load, servo performance directly reflects the overall performance and quality of the whole equipment. Manipulator shape diagram as shown in Figure.
3, robot principle introduction
The working principle of the robot is actually driven by the servo motor, because the servo motor can calculate the detailed number of revolutions, so you can calculate the distance of movement, the robot is often referred to as the axis, is calculated by the rotary part, a rotary part is considered an axis. Inside the control cabinet of the robot is a servo module and a computing board for controlling the movement of the servo motor and calculating the relative position.
The servo driver receives the PLC pulse command to drive the motor to drive the head for positioning movement. Positioning operation process to run smoothly and smoothly, the servo speed will determine whether the efficiency of the robot to meet the customer's application requirements, in the high-speed positioning of the servo motor can not appear overshoot, oscillation and rectification time is too long.
4、Commissioning considerations
In order to ensure that the servo drive can be reliable, stable and correct operation, in the installation, commissioning and use of the servo system, the following matters should be noted.
(1) the correct wiring: Zhishan servo standard encoder line and motor power line, but the wiring must be correctly connected to the signal line between the servo drive and the controller, otherwise the servo will not operate normally.
(2) correct setting of the servo control mode: as each machine application is different, so the correct setting of the servo control mode is to ensure the correct operation of the servo prerequisite.
3) Correctly match the gain parameters according to the actual operating effect, in addition Zhishan servo do not set the electronic position ring and gear ratio parameters in the case of servo enable or motor operation.
4) Ensure that the motor is well grounded and the drive is connected to the equipment housing. On the one hand to avoid interference, on the other hand to avoid leakage.
5) Signal lines try to choose shielded twisted pair, the shielding layer is generally connected to the terminal housing.
6) Pay attention to the interference problem, avoid interference with the encoder signal and control signal, the encoder line and signal line should not be tied together with the motor line and power line or through a line slot, try to keep a certain distance.
5、Conclusion
This robot fully combines the advantages of Zhiyama G series such as fast response, accurate positioning, short setting time and smooth operation. It enables the customer to achieve maximum satisfaction. This equipment fully demonstrates the advantages of Zhiyama servo to the customer, and also improves the competitiveness of the robot equipment in the market.
Contact Us
Electrical control:+86-400-820-7921 Variable frequency drive:+86-400-821-0325 Robot :+86-400-920-0275 Motion control:+86-021-3102 6318 Intelligent manufacturing:+86-021-6992 6005 E-mail:info@xinshida.com Address: No.599 Meiyu Road, Jiading District, Shanghai, 201802, China-
Business
-
Service
-
About
Swipe to follow STEP

STEP Service Number

STEP Subscription Number
©️ 2022 Shanghai STEP Electric Corporation ICP10024532-10